- Published on
I Should Feel Like I’m In Control - Understanding Expectations, Concerns, and Motivations for the Use of Autonomous Navigation on Wheelchairs
Abstract
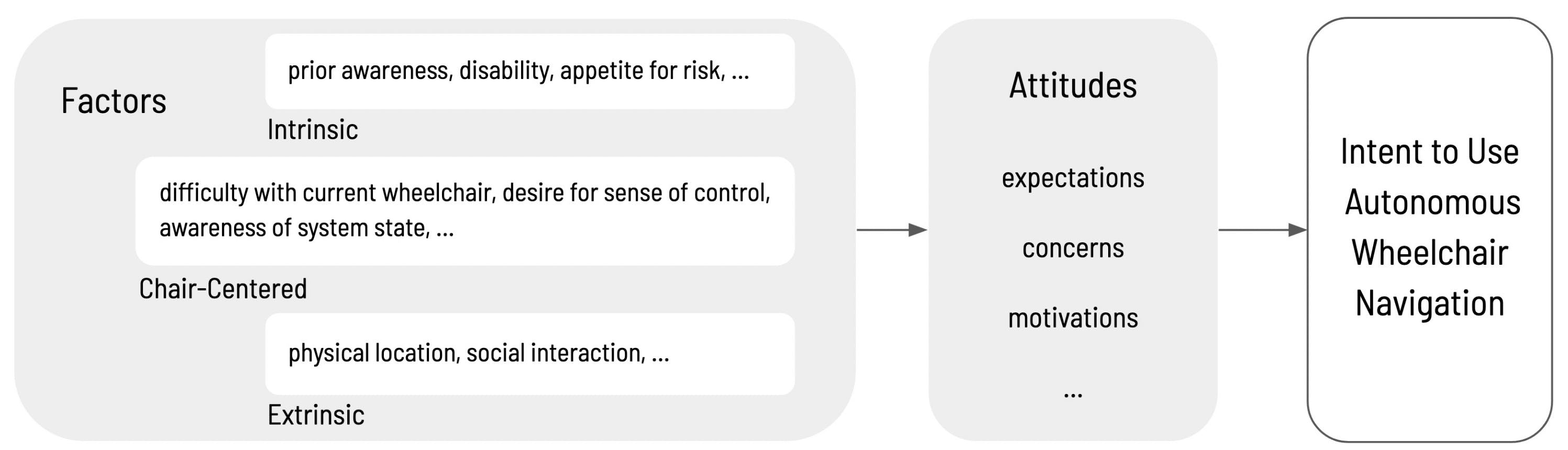
Autonomous navigation on wheelchairs promises to be a significant frontier in the evolution of the power wheelchair as an assistive enabling device, and is increasingly explored among researchers for its potential to unlock more accessible navigation for wheelchair users. While developments on path-planning methods for wheelchairs is ongoing, there is a relative paucity of research on autonomous wheelchair navigation experiences which accommodate potential users’ needs. In this work, we present preliminary design considerations for the user experience for autonomous wheelchair navigation derived from a semi-structured interview with ten (10) current wheelchair users about their willingness to use and applicability of an autonomous navigation function. From this, nine (9) expressed a willingness to use autonomous navigation in the near future in a range of contexts, while expressing attitudes like expectations, concerns, and motivations for intent to use. To better understand the impetus for such attitudes, we conducted thematic analysis to reveal three high-order factors and associated qualities which together serve as a framework to help understand participants’ intent. Finally, we highlight three critical areas of focus to highlight opportunities and challenges for developers of a user-centered autonomous navigation experience for wheelchairs.